My Cellar
My Cellar, AKA the command center!
I’ve had a fairly productive weekend sorting out my cellar, ready to crack on with some of my projects, although strictly speaking sorting out the cellar was actually on my list of projects. Besides the standard cleaning up of all the mess, including a good hoovering, was the final vanquishment of the cable monster. I know he’ll come back at some point, but I’m hoping that with enough will power from me to actually put things back where they belong, his return will not be for a long time.
Before (Already was beaten down from his full might about 3 months ago!):

Now:

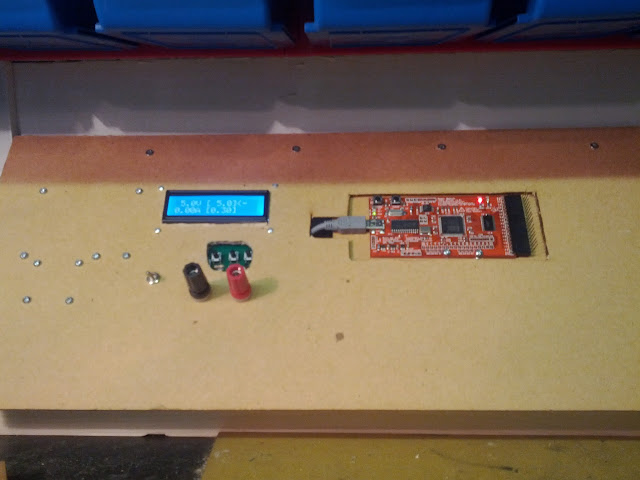
Next on my list of projects down here is the construction of my workbench panel. I want to embed a load of my equipment permanently along the back of the workbench, so for this I knocked up a quick frame that allows me to start mounting some of my tools. So far I have my digital power supply and OpenBench logic sniffer. The digital power supply is one built from a kit available online from Tux Graphics, which is a nice little variable current/voltage power supply, powered by an old laptop PSU, and controlled with an Atmega8a microprocessor. It will also hook up via usb to a computer, but unfortunately a slight design error in the placement of the power switch prevents me from doing this at the moment. The OpenBench logic sniffer is an open source logic analyzer hardware design.


I also want to embed a few other tools into this panel, such as a multimeter, frequency counter, usb hub, signal generator, and just about anything else that is useful and will cram in here.
In other projects, still waiting for me 3d printer to arrive. RepRap Central said to allow 3 weeks for delivery, but so far it has been over 5 weeks. I’m not impressed at all, and if they weren’t the only place I can find in the uk to get the complete kits from I would be going elsewhere. I’m hoping it arrives next week at some point, as I want to document the build process for this web site. On the quadcopter front, I’m beginning to think I’ve got a faulty controller board, or at least a faulty gyro on the board. I’ve ordered another one to give this theory a test, and if the new one works will get it replaced. Not really going to be a waste of money getting another as I’m sure I’ll be building a few. Once I have this first one off the ground, a bigger better one will be in the pipeline with full arducopter control, which includes gps, telemetry, and full autopilot!
So, thats two posts in to weeks. So far so good! 🙂
doc
nice! 🙂